
Intuitive Machines (IM)
Intuitive Machines (IM)
- Private Lunar Data Network (LDN).
- Five Data Relay Satellites (Khon satellites).
- Nova Control (MC center) in partnership with Fugro in Western Australia (SpAARC).
Nova-C Lunar lander
- Lunar lander.
- Commercial payload.
- Autonomous landing.
- Autonomous hazard detection.
- When landed capable to relocate itself.
- Not designed to withstand the cold temperatures of a lunar night. Operational approximately 14 Earth days, the length of the sunlit portion of one Moon day.
IM-1 Objectives
- Laser reflector navigation demonstration.
- Radio astronomy equipment demonstration.
- Study interactie between space weather and lunar surface.
- Studying the drifting moon dust with four cameras during the landing. Of importance for future landing craft. Brake rocket and moon dust in relation to the landing near a space base. Moon dust has an etching effect. They’re like little saws. It cannot be removed from space suits. Also affects driving equipment. Particulate matter with a lack of erosion.
IM-1 Payloads NASA
- Rolse (Radio Observations of the Lunar surface photoelectron sheath): Radio spectrometer for measuring the electron density near the lunar surface and how it may affect radio observatories, as well as observing solar and planetary radio waves and other phenomena.
- LRA (Laser Retro-reflector Array): LRA is a small, passive hemisphere containing eight approximately 0.5-inch-wide (1.3 centimeters) retro-reflectors designed to reflect light directly back in the direction it came from. LRA will allow spacecraft to ping it with lasers to help them determine their precise distance for landings or location in lunar orbit.
- NDL (Navigation Doppler Lidar for precise velocity and range sensing): A light detection and ranging (LIDAR) payload for determining precise altitude and speed during landing. The system could help enhance spacecraft capabilities in precision navigation and making controlled lunar landings.
- SCALPSS (Stereo Cameras for Lunar plume-surface studies): consists of four tiny cameras near the base of Odysseus. These will capture images and footage of the landing to help understand how exhaust from the lander’s engines interacts with the lunar surface. Accelerated dust could pose a threat to nearby spacecraft and habitats on the moon.
- LN-1 (Lunar Node 1 Navigation Demonstrator): cubesat-sized S-band radio navigation beacon that will demonstrate autonomous spacecraft positioning to support future lunar operations. It weighs just 3 kilograms and is 22 cm by 33 cm by 11 cm.
- RFMG (Radio frequency mass gauge statement): esigned to precisely measure the amount of propellant in spacecraft tanks using radio waves and antennae. The system could be useful for long-duration missions and could help support NASA’s Artemis program.
IM-1 Payloads commercial
- Columbia sportswear: Testing its Omni-Heat thermal reflective technology on the lander’s A2 closeout panel to protect Nova-C’s cryogenic propulsion tank.
- Embry-riddle Eaglecam. Cubesat-sized payload designed to capture the first-ever “third-person” image of a spacecraft making a lunar landing. Eaglecam, developed by students at Embry-Riddle Aeronautical University, will deploy from Odysseus about 100 feet (30 meters) above the lunar surface and capture the moment of touchdown.
- Jeffrey Koons‘ “Moon Phases” art: Artist Jeff Koons is sending 125 miniature stainless steel Moon Phase sculptures, each honoring significant human achievements across cultures and history, to be displayed on the moon in a cube.
- ILO-X: Dual-camera lunar imaging system and a precursor to the future International Lunar Observatory Association (ILOA) Hawaii flagship Moon South Pole Observatory, ILO-1. ILO-X will test and verify systems and conduct astronomy, including capturing images of the Milky Way.
- Lunaprise: Time capsule containing “lunagram” messages etched on pure nickel nanofiche. The aim is to create a secure lunar repository to preserve human knowledge indefinitely as part of Arch Mission Foundation’s billion-year archive.
- Independence: Cloud computing startup Lonestar’s Independence payload is a lunar data center test mission for data storage and transmission from the lunar surface.
IM-1 Intended Landing Site (ILS)
- Name: Malapert A Crater.
- Diameter: 69 km.
- 300 km from the South Pole of the Moon.
- Near the Malapert Massif (a possible landing site for Artemis III).
- Nova-C selects last minute the Designated Landing Site (DLS).
IM-1 Sequence of events (theoretical)
- Launch IM-1 (15-02-2024): Nova-C Odysseus (also called “Odie”). NASA booked a ride via its Commercial Lunar Payload Services (CLPS) program. Launch of the IM-1 lander required SpaceX teams to design a new fueling system and procedures to load the lander with liquid methane and oxygen while encapsulated in a Falcon 9 fairing.
- Launch vehicle separation (LVSEP).
- Shortly after launch, a spring force will gently push Odysseus away from the launch vehicle’s second stage, allowing the lunar lander to deploy and drift away toward the Moon. Odysseus is in a standby state before separation. Break wires connected to the launch vehicle let the Nova-C spacecraft know it has deployed, and a timer starts on the lander to activate its primary systems. After completing the separation timing interval, Odysseus powers on, including Guidance Navigation and Control (GNC), Automated Flight Management (AFM) software, radios, and thermal control.
- Autonomous commissioning.
- Engine commissioning burn: A key milestone 18 hours after launch, when the spacecraft fires its main engine for the first time in a commissioning test. That engine, developed by Intuitive Machines and using liquid oxygen and methane propellants, will later be used for any necessary trajectory correction maneuvers as well as for going into orbit around the moon and the landing itself. VR-900 engine, the first engine fueled by liquid oxygen and liquid methane ever used in space.
- Mission maneuvers:
Intuitive Machines expects to commission Odysseus several minutes after LVSEP autonomously. During autonomous commissioning, the lander’s GNC activates the cold-gas helium Reaction Control System (RCS) to control the vehicle attitude.
At this point, Odysseus does not know where it’s pointed, but it can stop its spin motion, much like a person spinning in a chair with closed eyes can control the spin without knowing where it stops.
After controlling the spin rate, special cameras known as star trackers autonomously match images of the distant star field and provide Odysseus with its orientation. Software onboard takes the star tracker measurements and processes them through an algorithm known as the Kalman filter to correct the onboard orientation, known as attitude, and then estimates and rejects bad measurements.
Once the GNC system has autonomously determined its attitude relative to the star field, it uses a reference position from the nominal launch vector to determine the approximate location of the sun. GNC then commands RCS jets to maneuver the lander’s top deck toward the sun with a slight angle to illuminate the top deck and side solar arrays to generate maximum power.
Odysseus holds this approximate attitude within +/- 15 degrees for the entire mission other than when flight controllers in Nova Control are executing maneuvers or pointing the lunar lander’s High Gain Antenna (HGA) used for communications back to Earth.
When Odysseus’ top deck is pointed toward the sun, this is known as max power attitude, which also helps flight controllers in Houston, Texas, manage the lander’s thermal state on the vehicle by keeping other systems in the shade of the top deck and side deck solar arrays. Each step in the commissioning process is expected to happen autonomously because flight controllers in Houston do not have communications with Odysseus yet.
When autonomous commissioning is complete and max power attitude is established, Odysseus turns on its communication radios and makes first contact with flight controllers in Nova Control.
After autonomous commissioning, flight controllers in Nova Control prepare for the engine commissioning maneuver using Odysseus’ state-of-the-art cryogenic propulsion system. The engine commissioning maneuver allows flight controllers to verify engine performance and adjust the lander’s first trajectory.
Odysseus is moving on a Trans Lunar Orbit (TLO) after LVSEP on its way to the Moon before Engine Commissioning. Flight controllers on the trajectory team (TRAJ) use the signal from the lander’s communication systems to perform Orbit Determination (OD) and fire arcs of this signal data to update how fast it is moving. Minor corrections are expected to stay on course, like a car driver making minor adjustments with the steering wheel along a straight stretch of road.
Intuitive Machines’ Flight Dynamics Officer (FDO) uses this update to calculate a direction to execute the engine Commissioning Maneuver (CM) for the best improvement in Odysseus’ trajectory to intercept the Moon. With the CM direction set by FDO, Intuitive Machines’ Flight Manager (FM) and Communications Officer (COMM) command the vehicle to rotate from max power attitude to burn attitude. Now, CM transitions control to Intuitive Machines’ Propulsion Operations (PROP) lead to begin the main engine burn.
There are multiple steps to performing a main engine burn. The first is to flow cryogenic methane and oxygen down the lander’s feed lines to the engine to condition the propulsion system temperature; we call this chillin the engine. PROP monitors several automated valve and temperature readings in this process to ensure everything is progressing within the expected parameter ranges.
The onboard AFM is monitoring the Time of Ignition (TIG) for the CM to begin. A few seconds before TIG, the RCS system fires jets to settle their tanks’ liquid methane and oxygen. Then, the main engine igniter comes on, much like a pilot light in a gas oven, to ignite methane and oxygen, which have been mixed in the combustion chamber by a carefully orchestrated opening of main throttle valves. The engine start-up sequence is something that Intuitive Machines has tested thousands of times to validate safety and reliability.
During CM, the vehicle holds a constant attitude by adjusting the angles of the main engine inside a two-axis gimbal ring designed by the Intuitive Machines team. The automated CM sequence also throttles the main engine to give the PROP team data to make necessary adjustments across the engine’s power range. At the same time, Odysseus continues to coast toward the Moon
After CM, TRAJ collects data from another OD update. FDO evaluates this update and calculates how far Odysseus might be from hitting its orbit target around the Moon. FDO uses a particular coordinate system called the B-Plane, which is the mission design equivalent of the square on the backboard in basketball. If a basketball player hits the backboard square with a shot, the ball is likelier to go in the hoop. Similarly, if Odysseus hits its target on the B-Plane, it is in the right spot to be captured into lunar orbit.
The expected mission scenario is that each Trajectory Correction Maneuver (TCM) will be smaller than the previous one as flight controllers dial in the lander’s B-Plane target. TCM 3 is the most critical maneuver because it is the last chance flight controllers in Houston have to correct Odysseus’ trajectory before it is captured into lunar orbit.
For each TCM, FDO evaluates the maneuver size needed to keep the B-Plane target in the lander’s path. If the TCM is less than the ability of Odysseus’ main engine to execute, the flight controllers may choose not to perform that TCM and make any corrections during the next opportunity.
The Nova-C class lunar lander’s three TCM burns are executed at maximum throttle, where the engine is most efficient. After each TCM, Intuitive Machines flight controllers point the lander’s HGA back to Earth for communication to Nova Control. Following TCM 3, the TRAJ team collaborates with FDO to finalize the OD solution crucial for updating the Lunar Orbit Insertion (LOI) maneuver.
Concurrently, Odysseus’ top deck maximizes solar energy capture post-TCM 3, adopting the maximum power attitude. As LOI approaches, Odysseus uses its RCS to orient retrograde, directing the engine towards the Moon for optimal positioning ahead of the maneuver.
- Traject Correction Maneuver: TCM 1, TCM 2, TCM 3 burns. By main engine VR-900.
- Lunar Orbit Insertion (LOI burn)
After flight controllers load the final LOI maneuver solution on Odysseus, Intuitive Machines expects about four hours of watching systems prepare for this maneuver. For IM-1, LOI is performed in the blind on the far side of the Moon. Flight controllers are not receiving real-time updates because there is no lineof-sight communication back to Earth.
The Nova Control team counts down to LOI TIG and waits for the lander to perform its largest maneuver, between 800 and 900 meters per second, to capture into a 100 km circular Low Lunar Orbit (LLO). This maneuver is approximately one-third of the total capability of Odysseus’ propulsion system.
After a successful LOI, the Nova Control team starts a cadence of activities to check the lander’s status and its systems in LLO to prepare for landing. This includes calibrating Odysseus’ navigation optical cameras for lunar illumination conditions.
For each lunar orbit, Intuitive Machines expects to have about 75 minutes of communication followed by 45 minutes where the Moon blocks Odysseus’ direct line-of-sight radio link between the lander and Intuitive Machines’ ground stations. When flight controllers lose communications and are in a communications blackout, we call it Loss of Signal (LOS). When flight controllers regain communication and are within line-of-sight, we call it Acquisition of Signal (AOS). Odysseus will orbit the Moon approximately 12 times before descending to the surface.
For Intuitive Machines, LLO environment is more complex than the deep space environment Odysseus experienced during transit. The Moon’s harsh environments are actively at play. When the lander is on the sunward side of the orbit, the sun heats the lander on one side, but the Moon also bakes the other side of the spacecraft with reflected infrared radiation, so Odysseus is very warm. Then, the lander passes into the lunar shadow, and the vehicle plunges into a deep cold regime and requires heater power drawn from batteries to keep systems warm.
- Descent Orbit Insertion (DOI burn) 1 hour before landing. Small maneuver that usually happens on the far side of the Moon. The main engine fires to slow the lander so that its minimum altitude drops from 100 km to about 10 km near the landing site. The low point of an orbit around the Moon is called perilune, while the high part is apolune. In orbit, Odysseus travels faster near the peri condition and slower at the apo state. This effect is an exchange of potential energy like what people experience riding a bike through hills, coasting fast at the low points and slower at the peaks. Once DOI occurs, Odysseus is completely autonomous. The lander is expected to coast for approximately one hour after DOI; then, the GNC system will activate the main engine for Powered Descent Initiation (PDI).
- Terrain Relative Navigation (TRN)
- Terrain Relative Navigation (TRN) cameras and lasers on the lander’s downward side feed information to the navigation algorithms, which provide guidance and control. This portion may sound complicated, but it’s something humans do each time they walk, ride a bike, or drive a car. Sensors are like human eyes collecting position, velocity, and orientation data. Navigation is a brain processing this information to determine where and how you move. Guidance is similar to a human brain determining, if I am here, moving in this direction, what do I need to do to get where I want to be? The answer could be to turn left or speed up. Control is the equivalent of turning the steering wheel or stepping on the accelerator to improve the guidance command. Human eyes act as sensors, seeing how things change, and the complete cycle repeats.
- Powered Descent Initiation (PDI)
- Odysseus must reduce its velocity by approximately 1,800 meters per second to land softly on the surface of the Moon. Some lander designs have propulsion systems with multiple jets that fire on and off during descent to achieve this; however, Nova-C has an engine designed to continuously burn and throttle from PDI until landing. This approach is similar to what the Apollo descent module did. When the lander engine comes on at PDI, it is initially in a hard braking phase. The lander stays in the braking phase until approximately 2 km from the landing site.
- Pitch over with main engine
- At the end of PDI, Nova-C pitches over using it’s main engine. Now, Odysseus is generally upright, with the Hazard Relative Navigation (HRN) sensors facing forward in the area where the lander intends to land.
- Hazard detection and avoidance
Intuitive Machines designed Odysseus’ trajectory to fly to the Intended Landing Site (ILS) on the Moon. Once the Nova-C class lunar lander is getting closer to its ILS, the onboard software selects a safe Designated Landing Site (DLS) with the slightest slope, free from hazards, with the range of the lander.
Odysseus’ systems are intended to match lunar gravity to fly toward the DLS. During this time, the main engine is continually throttling down, lowering the engine power to compensate for the lander getting lighter and lighter with spend propellants spent leaving the spacecraft’s mass.
- Vertical descent
- Odysseus’ GNC system flies the lander to a point approximately 30 m above the DLS, and the lander goes into a vertical descent at three meters per second. Then, the lander brakes to a one-meter-per-second descent rate 10 meters above the surface, preparing for terminal descent and landing.
- Terminal descent
At this point, Odysseus uses inertial measurements only. No cameras or lasers are guiding the spacecraft to the lunar surface because they would read lunar dust kicking up from the lander’s engine. Odysseus’ Inertial Measurement Unit (IMU) senses acceleration like a human’s inner ears, which feel rotation and acceleration.
Terminal descent is like walking towards a door and closing your eyes the last three feet. You know you’re close enough, but your inner ear must lead you through the door.
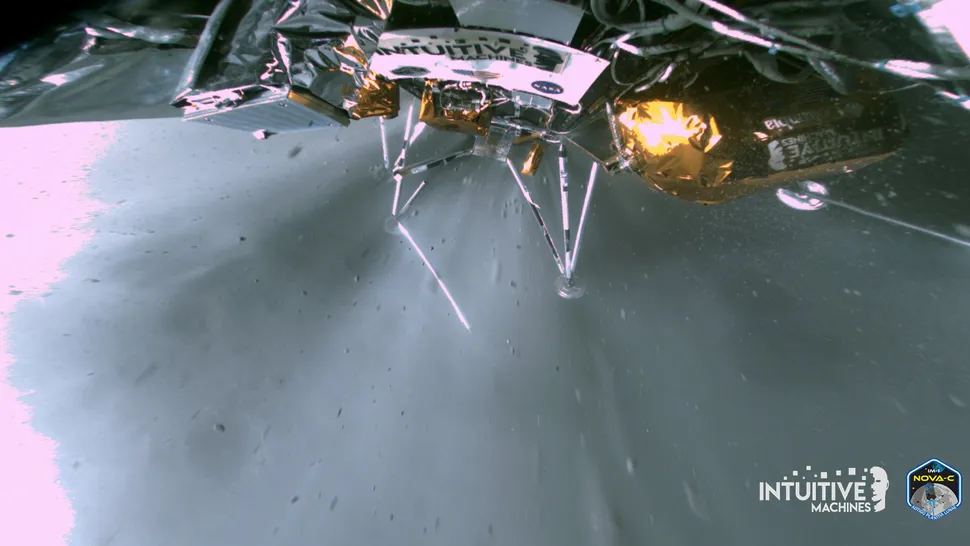
- Landing IM-1 (22-02-2024): On lunar surface near South Pole.
IM-1 Sequence of events (actual)
| MD | Date | DOW | Event | T to Landing | Duration | Remarks |
| 1 | 15-02-2024 | Thursday | 1 Launch 2 Launch Vehicle Separation 3 Autonomous Commissioning |
T-7 days | After 48 minutes in Trans Lunar Orbit (TLO). | |
| 2 | 16-02-2024 | Friday | 4 Engine Commissioning (burn). Several minutes after LVSEP. | T-6 days | 22 seconds | 18 hours after launch |
| 3 | 17-02-2024 | Saturday | None | T-5 days | ||
| 4 | 18-02-2024 | Sunday | 5 Traject Correction Maneuver (TCM 1 burn). | T-4 days | ? | Main engine VR-900. |
| 5 | 19-02-2024 | Monday | Nominal | T-3 days | ||
| 6 | 20-02-2024 | Tuesday | 5 Traject Correction Maneuver (TCM 2 burn). | T-2 days | 8 seconds | Main engine VR-900. |
| 7 | 21-02-2024 | Wednesday | 5 Traject Correction Maneuver (TCM 3 burn). | T-1 day | Main engine VR-900. To a more eliptical obit at 92 km. | |
| 7 | 21-02-2024 | Wednesday | 6 Maneuver to Lunar Orbit Intertion Attitude 7 Lunar Orbit Insertion (LOI burn) 8 Low Lunar Orbit |
T-1 day | ||
| 8 | 22-02-2024 | Thursday |
Issue: Laser rangefinders, which help it determine its speed and position, were not working. |
Landing day |
MC found out that Navigation Doppler Lidar (NDL) was not working because somebody had left a safety feature enabled on NDL. NDL is needed for landing guidance. Manual interlock. Payload LN-1 (other sort of lidar) helped out. |
|
| 22-02-2024 | Thursday |
Navigation Doppler Lidar (NDL), possesses light detection and ranging capabilities. This NDL switch is also why Intuitive Machines had to delay the landing time by two hours. Software patch update (hack) needed to get the LN-1 to talk to the landing software. |
Landing day | NDL consists of 3 telescopes. Needed for TRN, knowing the velocity and and not to tip over. | ||
| 22-02-2024 | Thursday | The team was able to get to work and re-purpose LN-1 for NDL. | Landing day | Upload patch. | ||
| 22-02-2024 | Thursday | 1 extra burn necessary and an extra rotation (more eliptical) around the Moon. | T-3 hours | 2 hours | Nova Control, Houston. Using VIS (Visual awareness tool) realtime animation. | |
| 22-02-2024 | Thursday | Telemetry (Coast to PDI) | T-1 hour and 20 minutes | Speed: 5.523 km/hours, distance from moon 224.317 km. | ||
| 23-02-2024 | Thursday | Telemetry (Coast to PDI) | T-1 hour and 13 minutes | Speed: 5.530 km/hours, distance from moon 223.163 km. Time since launch: 07:16:04:00 (dd:hh:mm:ss) | ||
| 22-02-2024 | Thursday | 9 Descent Orbit Insertion (DOI burn) | T-1 hour | 401 seconds | Slowdown the vehicle to 1.800 meters/second at PDI. | |
| 22-02-2024 | Thursday | 10 Terrain Relative Navigation (TRN) | T-1 hour | Aditional assisted by NDL. | ||
| 22-02-2024 | Thursday | Telemetry | T-33 minutes | Altitude 55 km. | ||
| 22-02-2024 | Thursday | Telemetry | T-26 minutes | Altitude 30 km. | ||
| 22-02-2024 | Thursday | Tank feedline and pressure | ||||
| 22-02-2024 | Thursday | 11 Powered Descent Initiation (PDI burn) | T-13 minutes |
13 minutes (90% thrust). Helium tank pressure for attitude control nominal. |
Autonomic sequence start. 1 continuous burn. Starting 1.800 meters/second velocity decrease. | |
| 22-02-2024 | Thursday | 12 Pitch over with main engine (vertical descend) | T-2 minutes | 1 continuous burn. Meters above the surface. | ||
| 22-02-2024 | Thursday | 13 Hazard Detection and Avoidance (HDA), Hazard Relative Navigation (HRN) | T-2 minutes | 1 continuous burn. | ||
| 22-02-2024 | Thursday | 14 Vertical descent | T-60 seconds | 1 continuous burn. | ||
| 22-02-2024 | Thursday | 15 Terminal descent | T-60 seconds | 1 continuous burn. | ||
| 22-02-2024 | Thursday | Engine shuttoff 16 Landing |
T (landing) | Earth is always visible from the chosen landing location for IM-1. This is not the case with IM-2. | ||
| 23-02-2024 | Thursday | Aquisition of Signal (no signal) | T (landing) | Mission Director (MD) asked if ground stations were locked and to check last bit of data. Cucle antenna pairs. Sweep by Jodrell Bank Observatory (UK) and in Australia.Not all antennas might be directed to Earth. | ||
| 24-02-2024 | Thursday | Aquisition of Signal (weak signal) | T+10 minutes | 10 minutes | Weak signal detected from High Gain Antennas. MD: Nova-C “Odysseus” stands on the moon and is alive. If there has been no communication between Nova-C and Mission Control (MC) for 15 minutes, Nova-C automatically sends a signal via other channels. And 15 minutes later a second time. | |
| 9 | 23-02-2024 | Friday | Press conference | T+1 day | Measurements show that Nova-C is lying on its side (on panel E). There are no important instruments there. Upon landing there was still a sideways movement going on. One of the legs probably got stuck on a stone. The top of the lander faces Earth. There are no photos from the moon’s surface yet. The landing data is currently being downloaded. | |
| 10 | 24-02-2024 | Saturday | None | T+2 days | ||
| 11 | 25-02-2024 | Sunday | None | T+3 days | ||
| 12 | 26-02-2024 | Monday | None | T+4 days |
|
|
| 13 | 27-02-2024 | Tuesday | T+5 days |
27-02-2024 Press conference:
|
||
| 14 | 28-02-2024 | Wednesday | T+6 days | |||
| 15 | 29-02-2024 | Thursday | Originally expected completion date | T+7 days | Originally expected completion date. | |
| 16 | 01-03-2024 | Friday | Odysseus put to sleep mode | T+8 days |
In three weeks, sunlight is expected again at the spot where the lander landed. The team has programmed Odysseus to signal Earth if he catches enough sunlight, allowing him to turn himself back on. | |
| x | 21-03-2024 | Turn on? |
IM-1 Evaluation
Positive
- Landed on the moon near the South pole.
- At 0.1% of the Apollo cost.
Negative
- NDL enabled, patch needed to use LN-1 instead.
- It was decided not to use Eaglecam during landing because of the NDL issue.
- No SCAPPSS data (yet). Depending on band width.
- Contact lost after landing.
- No footage of landing.
- High Gain antenna not pointed at the Earth.
- Weak signal. No stable link. Using Low Gain antenna will be a race against lunar night (in a week). Triage.
- IM reports after 12 hours the signal is weak (had already been determined by amateur astronomers).
- IM reports (after closure of the stock market) the lander fell forward upon landing. One of the legs dug in. The top probably rests on a boulder. The lander lays on panel E (5), on this side there is only Jeff Koons’ art project. 27-02-2024 Tipped over, broken leg.
- Landed 1,5 km from Malapert A (ALS, Actual Landing Site). 300 km from South Pole.
- Nova-C stops working sooner than expected (too little sunlight).



IM-2 Objectives
- Partnered with Northrop Grumman to design a Lunar Terrain Vehicle (LTV) to transport NASA’s Artemis astronauts around the lunar surface. Lunar Outpost’s
- The primary payload, PRIME-1, includes the TRIDENT ice drill to sample ice from below the lunar surface and the MSolo mass spectrometer to measure the amount of ice in the samples.
IM-3 Objectives
- It will deliver payloads to the Reiner Gamma lunar swirl for the Commercial Lunar Payload Services program. There the lander will conduct experiments investigating the properties of the unexpected magnetic field that has been detected in the vicinity of the Reiner Gamma swirl.
Nova-D lunar lander
- Will use two of the VR-900 engines and be capable of carrying more than 500 kg to the lunar surface.
Nova-M lunar lander
- Two VR-3500 engines originally developed for Boeing and their HLS to carry 5,000 kg to the lunar surface.
Footnotes
- Artemis progress
- Intuitive Machines (external)
- Nova- C (external)